关键词: 方案, 工作原理
问:车载激光雷达系统的设计思路
设计一个TOF车载激光雷达系统,首先要确定系统需要探测的最小目标、该目标的反射率,以及该目标的距离,视场角。上述这些因素会定义系统的角分辨率。并在该基础上计算最小信噪比(SNR),这也是后续软件判定检测对象真/假的重要检测标准。
1. 检测距离
我们以自动驾驶汽车,防撞的应用来举例。最小目标:小轿车4.8m×1.8 m长。目标的反射率:取决于物体本身的性质(表面状况)。这里不详细讨论,假设目标可以很好的反射。
以汽车100公里/小时的速度来计算,不仅考虑以100 km/h速度行驶的车辆,还要考虑以相同速度反向行驶的另一辆车辆。因此,雷达系统需要能够检测到200公里/小时的物体,也就是每秒相对运动至少50m。
当然,还要考虑,如非线性速度、停车距离、规避动作等复杂情况。所以一般说来,高速应用需要激光雷达系统检测更远的距离。
2. 视场角(FOV)
对于不同的应用,不同的环境,视场角的选择也不一样。
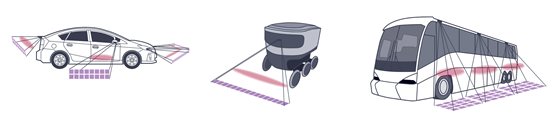
如上图:对于自动驾驶车辆和自动地面车辆的对象检测和防撞等应用,可以使用16像素FOV。在大客车应用中,可以用4 × 4网格矩阵,以检测系统周围的物体,作为车辆的安全器件。
3. 从FOV到角度分辨率
确定FOV之后, 我们可以计算相应的分辨率。
FOV可以分为垂直FOV(VFOV)和水平FOV(HFOV)
当激光二极管阵列选定之后,比如下图,一行16个激光二极管组成一个阵列,每个像素尺寸2mm×0.8mm, 20mm焦距的镜头。
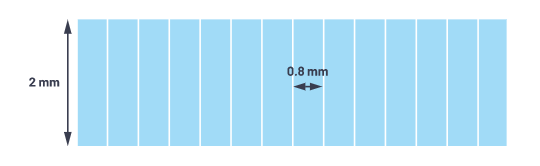
于是,可以利用三角函数可以计算每个像素对应的VFOV与HFOV
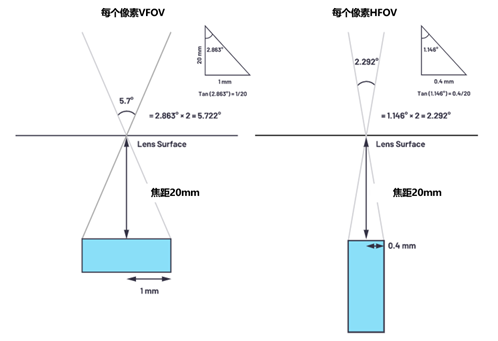
因此,根据三角函数我们可以得出每个像素,VFOV=5.7°,HFOV=2.292°
有了VFOV/HFOV, 我们就可以得知在某一特定距离,实物尺寸与相素的关系。
角度分辨率
换一个场景,假设FOV=1°,即1°角度分辨率,在200 m距离时,
一个像素点,对应于2×Tan(0.5°)×200m=3.5m长的物体。
即1°角分辨率会转换成每侧3.5米像素。
对于4.8m×1.8 m小轿车来说,很难检测。
相比FOV=0.1°,即0.1°角度分辨率,在200 m距离时,
一个像素点,对应于2×Tan(0.05°)×200m = 0.35m长的物体。
对于一个4.8m×1.8 m长的小轿车,在200 m距离时,至少可以有5个像素宽度的成像。
精细的角度分辨率使车载雷达系统能够从单一对象接收多个像素的返回信号。因此,在这个系统下,甚至有可能区分汽车和摩托车。
4. 距离精度与最小信噪比(SNR)
距离(或深度)、精度都与ADC采样速率相关。距离精度允许系统准确地知道一个物体有多远。对于移动的应用来说,非常重要。
假设ADC采样周期Δt 为1 ns采样时段, 我们可以计算距离
d=(c×Δt)/2 = 15cm
c是光速
即使用1 GSPS ADC的距离精度可达到15 cm。
当然可以采用更复杂的技术(例如过采样插值)来改善范围测量精度。
据估计,大约可以将范围测量精度提升SNR的平方根。匹配滤波器是用于处理数据的性能最高的算法之一,它可以在插入之后最大化SNR,以得出最高的范围测量精度。
5. 激光雷达系统拓扑结构
以ADI的方案为例:
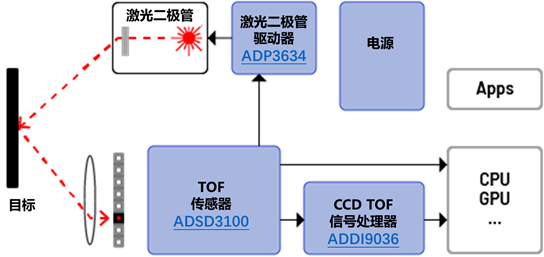
相关产品:
Digi-Key TOF 图像传感器
Digi-Key ADDI9036 开发板 AD-FXTOF1-EBZ , AD-96TOF1-EBZ
激光二极管驱动器 ADI ADP3634
更多激光设计的技术信息, 请查看以下内容:
******
如有任何问题,欢迎联系得捷电子DigiKey客服团队。
中国(人民币)客服
- 400-920-1199
- service.sh@digikey.com
- QQ在线实时咨询 |QQ号:4009201199
中国(美金)/ 香港客服
- 400-882-4440
- 8523104-0500
- china.support@digikey.com

到微信搜寻“digikey”或“得捷电子”
关注我们官方微信
并登记成会员,
每周接收工程师秘技,
赚积分、换礼品、享福利